
Учебник ТРИЗ/Законы развития технических систем
ЗАКОНЫ РАЗВИТИЯ ТЕХНИЧЕСКИХ СИСТЕМ
[править]Напомним, что законы развития технических систем представляют собой фундамент, на котором строится ТРИЗ (см. рис. 1 и 2). На основании законов строятся все остальные части ТРИЗ, кроме того, законы используются для прогнозирования развития технических систем и развития сильного мышления.
Законы развития технических систем, разработанных Г.С.Альтшуллером
[править]Общие сведения
[править]В середине 70-х годов Г.Альтшуллер разработал систему законов, которая была описана в двух работах «Линии жизни» технических систем[1][1][2] и «О законах развития технических систем», которые была распространена в школах ТРИЗ [2][3]. В дальнейшем они были опубликована в книге «Творчество как точная наука» [3] и сборнике "Дерзкие формулы творчества" [4].
В более поздних работах Г.Альтшуллер уточнил понятие законов перехода в надсистему и увеличения степени вепольности [5].
Кроме того, Г.С.Альтшуллером совместно с И.М.Верткиным был разработан закон увеличения пустотности[6][4].
Законы были развиты на три группы: "статика", "кинематика" и "динамика". Приведем эти законы:
Статика
[править]1. Закон полноты частей системы
Необходимым условием принципиальной жизнеспособности технической системы является наличие и минимальная работоспособность основных частей системы.
Следствие из закона 1:
Чтобы система была управляемой, необходимо, чтобы хотя бы одна её часть была управляемой.
2. Закон "энергетической проводимости" системы
Необходимым условием принципиальной жизнеспособности технической системы является сквозной проход энергии по всем частям системы.
Следствие из закона 2.
Чтобы часть технической системы была управляемой, необходимо обеспечить энергетическую проводимость между этой частью и органами управления.
3. Закон согласования ритмики частей системы
Необходимым условием принципиальной жизнеспособности технической системы является согласование ритмики (частоты колебаний, периодичности) всех частей системы.
Кинематика
[править]4. Закон увеличения степени идеальности системы
Развитие всех систем идет в направлении увеличения степени идеальности.
5. Закон неравномерности развития частей системы
Развитие частей системы идет неравномерно; чем сложнее система, тем неравномерное развитие её частей.
6. Закон перехода в надсистему Исчерпав возможности развития, система включается в надсистему в качестве одной из частей; при этом дальнейшее развитие идет уже на уровне надсистемы.
Динамика
[править]7. Закон перехода с макроуровня на микроуровень Развитие рабочих органов системы идет сначала на макро-, а затем на микроуровне.
8. Закон увеличения степени вепольности
Развитие технических систем идет в направлении увеличения степени вепольности.
Структура законов развития систем В.Петрова
[править]Природа, различные области знания, деятельности, мышление и любые объекты материального мира, в том числе и техника, развиваются по своим определенным законам. Но существуют и некоторые общие законы развития, появившиеся вследствие единства материального мира. Самые общие из них - законы диалектики.

Техника развивается в тесном взаимодействии с общественным развитием и экосферой, вследствие чего наблюдаются значительное проникновение и обогащение законов развития общества, природы и техники. Например, развитие техники во многом зависит от потребностей общества и влияет на развитие природы [9]. В данной книге будет в общих чертах изложена система законов, кратко описаны все законы и более детально изложены наиболее важные законы, которые читатель может использовать. Подробно с законами можно ознакомиться в специальной книге по законам развития систем.
В общем виде, система законов техники должна иметь уровни потребностей, функций и систем [10]. Схематично это изображено на рис. 11.

Закономерности развития потребностей определяют тенденции их изменения. Это необходимо для определения функций и систем, с помощью которых можно удовлетворить возрастающие потребности. Закономерности развития функций описывают тенденции их изменения. Они связаны с закономерностями развития потребностей, но имеют и свою специфику, например, переход систем к многофункциональности (универсальности) или, наоборот, к однофункциональности (специализации).
Законы развития потребностей и функций здесь рассматриваться не будут. Подробнее с ними можно ознакомиться в учебном пособии по законам развития технических систем и статьях .
Собственно законы техники можно разделить на две группы (см. рис. 12):
- законы организации систем (определяющие жизнеспособность системы),
- законы эволюции систем (определяющие развитие технических систем).
Законы диалектики в развитии технических систем
[править]Наиболее общие из законов диалектики следующие:
- единство и борьба противоречий,
- переход количественных изменений,
- отрицание отрицания.
Действие этих законов распространяется на все области бытия и мышления, по-разному развиваясь в каждой из них. Именно поэтому каждая вновь создаваемая наука должна опираться на эти законы.
Закон единства и борьбы противоположностей
[править]Закон единства и борьбы противоположностей - ядро диалектики. Он служит источником возникновения любых объектов, в том числе материального мира и, в частности, технических систем. Закон характеризует одно из основных понятий ТРИЗ - противоречие, которое будет подробно рассмотрено дальше.
Понятие единства и борьбы противоположностей было ведено более 5000 лет древними китайскими философами в описании картины Мира, включающую материальную и духовную стороны. По мнению китайских философов, вселенная образована из энергии Чи (Chi), которая является средством взаимодействия мировых сил Инь (Yin) и Ян (Yang).
Силы Инь - символизируют Тьму, Холод, Зло, Покой, все отрицательное, плохое, женское начало.
Силы Ян - символизируют Свет, Тепло, Добро, Деятельность, все положительное, хорошее, мужское начало.
Силы Инь и Ян взаимодействуют, взаимопреодолевают и превращаются друг в друга.

Постепенно нарастая одна в другой, они переходят стадию предела, когда преодоление одного начала сменяется преодолением другого. Затем начинается обратное движение. Этот процесс бесконечен, ибо движение во вселенной вечно.
Идею вечного движения и борьбы противоположных начал воплощает известный графический образ Инь-Ян (монада) - темная и светлая доли круга.
Символически это показано на рис. 13, где белая часть круга - сила Ян, а черная - Инь.
Черный кружок на белом фоне означает, что Ян рождает Инь, а белый кружок на черном - Инь рождает Ян. Уменьшение Ян приводит к увеличению Инь (см. внизу круга) и, наоборот (верх круга).
Закон перехода количественных изменений в качественные
[править]
Закон перехода количественных изменений в качественные вскрывает общий механизм развития. В процессе развития количественные изменения в системе происходят непрерывно. При достижении определенного предела совершаются качественные изменения. Новое качество ускоряет темпы роста. Количественные изменения при этом совершаются постепенно (эволюционно), а качественные - скачком. Характер и продолжительность скачка могут быть разнообразными - длительными и кратковременными, бурными и относительно спокойными, с взрывом и без него и так далее. Любая система (в том числе и техническая) проходит несколько этапов своего развития (см. рис. 14).
Вначале система развивается медленно (участок I), при достижении некоторого уровня развитие ускоряется (участок II) и после достижения некоторого более высокого уровня скорость роста уменьшается и в конечном итоге рост параметра системы прекращается (участок III), что означает появление в системе некоторых противоречий. Иногда параметры начинают уменьшаться (участок IV) - система "умирает".
Подобные кривые часто называют S - образными.
Для технических систем:
- участок I - "зарождение" системы (появление идеи и опытных образцов),
- участок II - промышленное изготовление системы и доработка системы в соответствии с требованиями рынка,

- участок III - незначительное "дожимание" системы, как правило, основные параметры системы уже не изменяются, происходят "косметические" изменения, чаще всего не существенные изменения внешнего вида или упаковки,
- участок IV - ухудшение определенных параметров системы, которое может вызываться несколькими фактами:
- следование моде, влияние экономической, социальной или политической ситуации, религиозные ограничения и т.п.;

- физическое и моральное старение системы.
Как правило, на участке IV система прекращает свое существование или утилизируется. Прекращение роста данной системы не означает прекращение прогресса в этой области. Появляются новые более совершенные системы - происходит скачок в развитии. Это типичный пример проявления закона перехода количественных изменений в качественные. Такой процесс изображен на рис. 15.
На смену системе 1 приходит 2. Скачкообразное развитие продолжается - появляются системы 3, 4 и т.д. (рис. 16).
Общий прогресс в отрасли можно показать при помощи касательной к данным кривым (показанная на рисунке пунктирной линией) - так называемой огибающей кривой, [11].
Развитие любого вида техники может быть примером, подтверждающим этот закон. Обратимся к судостроению.
Пример 39. Скорость передвижения гребных судов (рис. 17) постепенно повышалась за счет увеличения числа весел, но не превышало 7-8 узлов[12].
Скачок в развитии - появление парусных судов(рис. 18). Рост скорости здесь осуществлялся путем увеличения общей площади парусов. Однако самые быстроходные парусные корабли не показывали более 12-13 уз. В то же время коммерческие клиперы середины XIX в. развивали до 20 уз[13].
Дальнейшее повышения скорости передвижения и независимость его от скорости и направления ветра привело к очередному скачку - появились суда с двигателями(рис. 19). Увеличение скорости хода в этом типе судна происходило путем совершенствования двигателей и замены их на другие типы с большей удельной мощностью.
Следующим скачком в развитии судостроения было вынесение водоизмещающей части корпуса судна из воды. Появились суда на подводных крыльях (рис. 20) и полупогруженные суда (рис. 21). В дальнейшем еще уменьшили сопротивление воды о корпус (о стойки крыльев) - придумали суда на воздушной подушке (рис. 22). И, наконец, дальнейшее уменьшение сопротивление движению корпуса - судно вынесли еще дальше от воды - появились экранопланы (рис. 23).
-
 Рис. 17. Гребное судно
Рис. 17. Гребное судно -
 Рис. 18. Парусное судно
Рис. 18. Парусное судно -
 Рис. 19. Судно с двигателем
Рис. 19. Судно с двигателем -
 Рис. 20. Судно на подводных крыльях
Рис. 20. Судно на подводных крыльях -
 Рис. 21. Полупогруженное судно
Рис. 21. Полупогруженное судно -
 Рис. 22. Судно на воздушной подушке
Рис. 22. Судно на воздушной подушке -
 Рис. 23. Экраноплан
Рис. 23. Экраноплан







Пример 40. Гребные суда.
Общая тенденция развития гребных судов показана на рис. 24.

Сначала лодкой управляли с помощью одного весла.


До нас дошли каноэ [14] (рис. 25 а) и гондола [15] (рис. 25 б).
Далее число весел в лодке увеличивалось.
Гребные суда первоначально располагали весла в один ярус (рис. 24 б).
Увеличение числа весел привело к необходимости располагать их в два яруса, например, греческая боевая галера приблизительно V в. до н.э., так называемая бриема (рис. 24 в). Она, естественно, обладала большей скоростью, чем корабль той же величины с половинным числом весел.
Далее в этом же столетии получили распространение и триеры - боевые корабли с тремя "этажами" гребцов (рис. 24 г).
Были и корабли с пятью ярусами весел - кинкеремы. Древнегреческие судостроители умели строить еще большие суда, достигавшие 100 м в длину и более 10 м в ширину, имевшие более 400 гребцов [16]. При Птолемее IV Филопаторе (221-205 гг. до н.э.) был построен корабль длиной около 125 м и шириной 22 м [17].
Пример 41. Парусные суда.
Общая тенденция развития парусных судов показана на рис. 26.

Первоначально появился один парус на одной мачте.

В дальнейшем количество парусов и мачт увеличивалось. Были суда с тремя и более мачтами (рис. 26)[18]и многочисленными парусами.
Пример 42. Дальнейшее повышение скорости передвижения и независимость его от скорости и направления ветра привело к очередному скачку - появились суда с двигателями (рис. 27). Увеличение скорости хода в этом типе судна происходило путем совершенствования двигателей и замены их на другие типы с большей удельной мощностью. Первоначально появился паровой двигатель, затем дизель, паровая или газовая турбина, атомная установка.
Пример 43. Следующий скачок произошел, когда водоизмещающую часть корпуса судна вынесли из воды - суда на подводных крыльях (рис. 20), а потом появились полупогруженные суда (рис. 21).
Пример 44. В дальнейшем еще уменьшали сопротивление воды о корпус (о стойки крыльев) - суда на воздушной подушке (рис 22).
Пример 45. И, наконец, появились экранопланы (рис. 23).

Пример 46. Имеется и промежуточный (весьма забавный) вариант. Между водоизмещающими судами и судами на подводных крыльях. Запатентовано судно, снабженное надувными или полыми валиками, используемыми в качестве колес.
На рисунке 28 приведен вид сбоку этого судна. К корпусу 1 судна посредством конструкции 2 и 3 крепится валик 4. При движении судна корпус остается приподнятым над водой. Судно может передвигаться с меньшей затратой энергии, чем обычное судно, кроме того, такие суда смогут передвигаться по мелководью[19].
Учет закона перехода количественных изменений в качественные происходит на этапе выбора задачи и прогнозирования развития систем.
Закон отрицания отрицания
[править]Суть закона отрицания отрицания заключается в том, что процесс поступательного развития происходит в относительной повторяемости, как бы по пройденным ступеням. Но повторение каждый раз происходит на более высоком уровне с применением новых элементов, материалов, технологий и т.д. Можно сказать, что процесс развития происходит по спирали. Наиболее ярко это заметно в моде.
Проиллюстрируем этот закон.

Пример 47. В XIX веке на парусно-винтовых судах двигатели использовались только при штиле. Чтобы гребной винт не создавал сопротивления при плавании под парусами, его делали съемным и поднимали через шахту в корме (рис. 29) на палубу[20] .
Совершенствование силовой установки позволило избавиться от парусов. Потребность в съеме винта отпала. Шахту в корме над винтом делать перестали. В ХХ веке большие гребные винты стали делать со съемными лопастями. Судно оснастили оборудованием для замены лопастей гребного винта на плаву. И снова появилась необходимость делать в корме шахты. В изобретении Великобритании, сделанном в 1968 году и запатентованном и в СССР предложено для улучшения условий ремонтопригодности, в навесной корме, расположенной над гребным винтом, сделать шахту, через которую поднимают и опускают ремонтируемую лопасть.
Вот еще одно решение этой проблемы для транспортных и рыболовных судов прибрежного плавания, оснащенных и двигателем и парусами. Датские инженеры создали необычный винт. Когда судно движется под парусами, винт автоматически складывается и практически не создает сопротивления. Но стоит упасть скорости судна, как лопасти винта тотчас занимают рабочее положение. Одновременно включается и двигатель. Суда с таким винтом развивают скорость на 10% выше обычных [21].
Пример 48. С появлением пароходов роль парусного флота стала уменьшаться, и сейчас паруса используются лишь на небольших рыболовецких, спортивных или учебных судах. Однако в Гамбургском институте кораблестроения (ФРГ) разработан проект коммерческого парусного судна (рис. 30).
Паруса напоминают поставленные вертикально самолетные крылья. Мачты судов поворачиваются вокруг своей оси, ставя паруса под наиболее благоприятным углом к ветру. КПД новых парусов в 1,5 раза больше традиционных. Паруса ставятся и убираются по такому же принципу, как раздвижной занавес в театре.

Судно автоматизировано, и им можно было бы даже управлять на расстоянии. При среднем ветре под парусами судно может идти со скоростью 12-15 узлов, как и современные морские транспортные суда; при попутном ветре до 20 узлов (у судов в двигателями скорость при свежем ветре падает). Система парусов позволяет использовать самый слабый порыв ветра. На случай полного безветрия, что случается крайне редко, придется установить на судне маломощный двигатель. В ветреную погоду он будет управлять парусами. На паруснике установлен компьютер, обрабатывающий метеорологическую информацию, постоянно поступающую со спутника земли или наземной станции, и рекомендует капитану оптимальный курс.
В условиях энергетического кризиса паруса с успехом могут соперничать с любым двигателем, работающем на жидком топливе. Конструкторы считают, что достаточно вместительные парусники могут быть экономичнее даже судов с ядерными установками [22].
На рис. 30 изображен спортивное судно с крылом.
Законы организации технических систем
[править]Законы организации представляют собой критерии жизнеспособности для разработки новых технических систем. Структура этих законов представлена на рис. 31.

Жизнеспособность системы тесно связана с понятием системность.
Разрабатываемый объект будет жизнеспособен, если он выполнен системным.
Под системностью понимается работоспособная система, с определенной структурой, отвечающей ее предназначению. Эта структура должна обеспечивать главную цель системы, и выполнять все основные и вспомогательные функции.
Состав системы включает: собственно систему, ее подсистемы, надсистему и окружающую или внешнюю среду. Работоспособность зависит не только от структуры системы, но и учета всех взаимосвязей и взаимовлияний системы на надсистему, окружающую среду, системы на подсистемы и обратного влияния. Отсутствие учета таких влияний может не только отрицательно сказаться на работоспособности системы, но и влиять на внешнюю среду.
Системность учитывает и закономерности исторического развития исследуемого объекта.
Структурная схема системности представлена на рис. 32.

Таким образом, системность учитываться использованием законов полноты и избыточности системы и минимального согласования и обеспечение желательных взаимосвязей и взаимовлияний.
Полнота и избыточность могут быть функциональные и структурные.
Функциональная полнота и избыточность должны обеспечивать главную цель системы, и выполнять все основные и вспомогательные функции, т.е. выполнять одно из требований системности.
Структурная полнота и избыточность должна обеспечить наличие необходимых элементов и связей системы, т.е. выполнять другое требование системности – обеспечение состава и структуры системы.
В качестве основных элементов системы можно назвать:
- Источник и преобразователь энергии
- Рабочий орган
- Система управления.
Связи могут иметь самый разнообразный характер, в частности они могут представлять собой трансмиссию, которая передает и/или преобразует энергию.
Элементы и связи могут быть вещественные, энергетические и информационные. Которые должны содержаться в необходимом количестве и обеспечивать определенное качество.
Таким образом, закономерности организации определяют функциональный состав и структуру системы, обеспечивающие ее минимальную работоспособность.
В наиболее общем виде система может выполнять функции переработки, транспортировки и хранения. Функциональный состав должен соответствовать функциональному назначению системы, прежде всего ее главной функции. Работоспособность структуры определяется минимальным набором основных функций.
Минимальное согласование проводится по функциям, структуре и соответствия структуры функциям. Это третье требование системности – учет взаимосвязей и взаимовлияний. Таким образом, согласование бывает:
- Функциональное
- Структурное
- Функционально-структурное.
Последнее требование системности – учет исторического развития системы необходим при прогнозировании развития объекта исследования. Это происходит путем учета выявленных тенденций исторического и логического развития данного объекта, и учета общих законов развития систем.
Основными законами организации технических систем являются:
- полнота частей системы;
- избыточность частей системы;
- наличие связей между частями системы и системы с над системой;
- минимальное согласование частей и параметров системы.
В наиболее общем виде структура основных законов организации систем представлена на рис. 33.

Закон полноты частей системы
[править]Закон полноты частей системы описывает минимально необходимый набор частей, обеспечивающий минимальную работоспособность системы. В общем случае, необходимо наличие следующих частей системы:
- рабочий орган,
- энергия для обеспечения его работы,
- система управления рабочим органом.
В идеальном случае рабочий орган – энергия. Например, инструмент для плазменной обработки. Этот частный случай представляет собой одну из тенденций развития техники.
Минимальный набор элементов в средствах транспорта, например, это:
- движитель – рабочий орган,
- двигатель с источником энергии,
- корпус,
- система управления.
В качестве примера рассмотрим некоторые виды указанных частей судна.

Движитель для судов могут быть следующих видов: весло, гребное колесо и гребной винт, водомет, реактивная струя, парус, крыло, воздушный змей, парашют, пропеллер, вращающиеся роторы. Основные движители показаны на рис. 33[23] и рис. 34[24].

На рис. 33 показаны судовые ветродвижители, т.е. движители, которые используют энергию ветра.

Схема эффекта Магнуса изображена на рис. 35. Многие этот эффект наблюдали при исполнении так называемого "крученого мяча" в настольном теннисе или футболе. Суть его в следующем. Цилиндр (или шар) вращается в определенную сторону. Стрелкой показано направление вращения (ω - скорость вращения). Цилиндр находится в потоке ветра, показанного стрелкой W. Когда скорости ветра W и вращения цилиндра ω складываются (внизу на рис. 35), общая скорость V2 увеличивается. При увеличении скорости, согласно закону Бернулли, давление P2 в потоке воздуха падает (на схеме стоит знак минус "-").
С другой стороны (сверху) скорости вычитаются, общая скорость V1 уменьшается (V1 < V2), и давление P1 увеличивается (P1 > P2 - на схеме показан знак плюс "+"). Так образуется сила F, направленная перпендикулярно к потоку, которую можно использовать для движения судна[25].

Пример 49. Как известно эффективность паруса и крыла, прежде всего, определяется их общей площадью, поэтому их делают как можно выше. Однако удлинение парусов и крыльев приводит к уменьшению остойчивости судна. Оригинальное решение этого противоречия - кольцевые и полукольцевые паруса-крылья (рис. 36)[26].

Аналогичное решение предложено использовать и в авиации (рис. 37). По замыслу авторов, такое крыло в два раза меньше обычного, но из-за особенностей движение воздуха в "трубе" обеспечивают необходимую подъемную силу.


Пример 50. В 1924 г. Французский инженер Константен, воскрешая идею XVIII в., предложил применить ветродвигатели для движения судов (рис. 38). Вращение вала ветродвигателя передается с помощью трансмиссии, содержащей двойную угловую зубчатую передачу и вал, на обычный гребной винт, движущий судно[27].
Пример 51. Французский корабел М.Мар предложил в качестве движителя использовать ветряк (пропеллер)[28]. Трехлопастной ротор приводит в движение генератор, полученная электроэнергия питает электродвигатель, который вращает гребной винт (рис.39). Управление ротором проводится с помощью бортового компьютера, который устанавливает ротор против ветра и меняет шаг лопастей.

Пример 52. Возможна комбинация ветродвижителей, например, крыла и пропеллера. На рис. 40 показано судно с комбинированной ветроэнергетической установкой[29]. Установка состоит жесткого полукольцевого паруса-крыла с высоким аэродинамическим качеством, которое обеспечивается большим удлинением крыла и шайбами на нижних кромках крыльев. Система крыльев имеет механизм установки необходимого угла атаки. Внутри контура, охватываемого полукольцевым крылом, по оси симметрии крыла размещен самоориентирующийся по ветру крыльчатый ветродвижитель с горизонтальной осью, для которого жесткий парус служит габаритным ограждением для ветродвигателя во время его вращения.
При движении боковыми ветрами силу тяги создает жесткое полукрыло, а ветродвигатель застопорен, лопости его установлены горизонтально и развернуты во флюгерное положение. В таком положении ветродвигатель практически не влияет на работу крыла. В случае движения острыми курсовыми углами или прямо против ветра, когда парус не тянет, работает ветродвигатель самоориентируясь по каждому ветру, а полукольцевой жесткий парус устанавливается в плоскости вращения колеса и служит для него аэродинамической насадкой. Мощность от ветродвигателя через трансмиссию передается на гребной винт, вызывая движение судна.
При попутных ветрах полукольцевой жесткий парус в силу конструктивных условий (угол установки его ограничен) создает малую тягу, поэтому движение судна осуществляется также с помощью ветродвигателя. Реверс производится гребным винтом регулируемого шага (ВРШ).

Такое судно может успешно двигаться всеми курсами относительно ветра, минуя "мертвые зоны", и более эффективно использовать энергию ветра.
Пример 53. В Англии в качестве движителя использовали воздушный змей[30]. Крупная прямоугольная конструкция обтягивается прочной синтетической пленкой и заполняется гелием. На змее установлена метеорологическая аппаратура, которая передает информацию на судно. Змеем можно управлять с помощью перетекания газа во внутренних отсеках.
Подобное решение, но более простое в осуществлении предлагает английский изобретатель К.Стюарт. Он разработал надувной пластиковый "воздушный змей", который наполняется гелием и запускается с палубы судна. По сути, это тот же парус, но без мачты. Преимущество его в том, что этот "парус" может использовать потоки на высоте даже тогда, когда над морской гладью царит безветрие. Изобретатель приспособил свой движитель к небольшой яхте и несколько раз переплыл на ней Ла-Манш. Автор утверждает, что без принципиальных изменений его парус можно применить на судах водоизмещением до 150 тонн (рис. 41)[31].

Пример 54. Роторные суда, изобретены немецким авиационным инженером и изобретателем Антоном Флетнером [5]. Работа движителя А.Флетнера [6] основана на эффекте Магнуса (рис. 34). Роторные суда (рис. 42) имеют от одного до трех вертикальных цилиндров-роторов, вращаемых вспомогательным двигателем.

Пример 55. Из всех районов Земли наиболее полно энергию ветра можно использовать в Южном океане, ограниченном Австралией, Африкой, Южной Америкой и Антарктидой.
В проекте "Аврора" парус - это парашют длиной 450 м и диаметром чуть меньше 1 км, связанный с забалластированным поплавком и движущийся на высоте 170-300 м над уровнем воды (рис. 43).
Высота над уровнем океана, даже при отсутствии ветра, поддерживается гелием или водородом, заполняющим специальные камеры парусов[32].
В качестве двигателей в судах используют: дизель, турбина, атомный реактор и значительно реже - ветер и электродвигатель. Раньше использовали паровой двигатель. Наиболее часто встречающиеся в настоящее время двигатели показаны на рис. 44 [33].


Корпуса могут отличаться по их количеству, виду и материалу, из которого они сделаны.
- количество корпусов (рис. 45) 1 корпус (рис. 45 а), 2 корпуса – катамаран (рис. 45 б), 3 корпуса – тримаран (рис. 45в), 4 и более корпусов – полимаран (рис.45 г).
- материал корпуса: папирус, тростник (рис. 46), дерево, металл, пластмасса, стеклоткань и т.д.
- вид корпуса: плот (рис. 47), водоизмещающий корпус (рис. 48), полупогруженный корпус (рис. 49), с подводными крыльями (рис. 50), на воздушной подушке (рис. 51), экраноплан (рис. 52), подводное судно (рис. 53).
-
 Рис. 46. Южноамериканская тростниковая лодка
Рис. 46. Южноамериканская тростниковая лодка -
 Рис. 47. Инкский плот
Рис. 47. Инкский плот -
Рис. 48. водоизмещающий корпус
-
Рис. 49. Полупогруженное судно
-
Рис. 50. Судно на подводных крыльях
-
Рис. 51. Судно на воздушной подушке
-
Рис. 51. Экраноплан
-
 Рис. 52. Подводное судно
Рис. 52. Подводное судно




Пример 56. Научно-исследовательское судно (НИС), предложенное Стивеном Бэрроном (рис. 54), имеет полупогруженный корпус и роторный движитель[34].
Системы управления могут быть: непосредственные, дистанционные; ручные, механические, полуавтоматические, автоматические.
Пример 57. В автомобиле человек непосредственно управляет машиной – это непосредственная система управления. Луноходом управляли с Земли – это дистанционное управление. Когда-то автомобилем управляли в ручную, далее стали использовать усилитель руля – это механическое управление. На следующем этапе га отдельных не сложных этапах дороги можно было поручить управление полуавтомату. Сегодня существует автомобиль который полностью управляется автоматически.
Мы показали только некоторые из видов минимально необходимых частей системы, с выявления и выбора которых начинается проектирование новой системы. В дальнейшем мы используем другие законы организации систем. Осуществляется минимальное согласование между частями системы, устанавливаем связи между ними, и подбирает дополнительные элементы. Как правило, эти операции проделываются несколько раз не разных уровнях (системы, надсистемы, окружающей среды и подсистем).
Закон избыточности частей системы
[править]Закон избыточности частей системы предусматривает, что приблизительно 20% функций, элементов и связей системы выполняют около 80% работы. При создании работоспособной системы нужно учитывать, что для выполнения какой-либо работы, кроме основных элементов и связей (выполняющих главную функцию), необходимо еще приблизительно 80% вспомогательных, причем они, как правило, выполняют только 20% основной работы. Учитывая это, следует предусмотреть "лишний" расход вещества, энергии и информации (приблизительно 20% на обеспечение главной функции и 80% основных и вспомогательных).
ИЗБЫТОЧНОСТЬ может быть функциональная и структурная.
Функциональная избыточность определяется тем, что для обеспечения работоспособности системы, помимо главной функции, необходимо выполнять еще основные и вспомогательные функции.
Пример 58. Основная функция боевого корабля – поражение цели. Для обеспечения этой цели корабль должен выполнить второстепенные цели: плавучесть и маневренность корабля, обеспечение корабля энергией, обеспечение вооружением, защитой корабля, обеспечение жизнеобеспечения экипажа и многие другие функции.
Структурная избыточность определяется необходимостью введения дополнительных элементов и связей, кроме рабочего органа. Для обеспечения работоспособности системы; необходимы дополнительно: трансмиссия, источник и преобразователь энергии (двигатель), система управления и корпус.
Пример 59. Если вернуться к предыдущему примеру, то рабочий орган для указанной основной функции – ракета, а если быть еще более точным – взрывчатое вещество в боевой головке. Все остальные части: ракета, корабль со всеми его подсистемами и экипаж – это структурная избыточность.
Закон наличия связей между частями системы и системы с над системой
[править]В системе необходимо обеспечить различные виды связей: вещественные и полевые (энергетические и информационные).
Связи бывают внутренние и внешние. Внутренние связи обеспечивают связи между подсистемами в системе, а внешние связи – системы с надсистемой.
Вещественные связи обеспечивают механическую работоспособность и сборку системы.
Энергетические связи обеспечивают энергией систему, подводя энергию к необходимым элементам.
Информационные связи необходимы для обеспечения контроля и управления системой.
Пример 60. Гребной вал является примером внутренней механической связи двигателя и гребного винта Внутренняя часть корпуса обеспечивает механическую связь всех частей корабля.
Пример 61. Трубопроводы от топливных баков к двигателю и электропроводка обеспечивают энергетические связи.
Пример 62. Кабели идущие к системе управления кораблем и к системам управления стрельбой представляют собой информационные связи. К информационным связям относится и радио связь.
Пример 63. К внешним связям (связи с внешней средой и надсистемой), например, можно отнести связь корпуса с водой и все виды связей с другими средствами, с командованием и спутниками.
Закон минимального согласования частей и параметров системы
[править]Минимальное СОГЛАСОВАНИЕ системы должно быть функциональным, структурным и функционально-структурным.
Функциональное согласование должно максимально уменьшить вспомогательные и сократить основные функции, т.е. найти их минимально необходимое и достаточное число для обеспечения жизнеспособности системы в выполнении главной функции. Особенно важно такое согласование проводить для больших систем, так как одинаковые или смежные функции могут выполняться одними системами. Таким образом, происходит свертывание систем.
Пример 64. В одном из видов офсетных (печатных) машин необходимо протягивать (перемещать) рулонную бумагу на разных участках машины, причем, когда перемещают бумагу на одном участке, то на другом участке ее не нужно перемещать. Таких участков минимум четыре. В машине поставили отдельные двигатели на каждый участок перемещения.
Если бы было проведено функциональное согласование до этапа проектирования машины, то можно было бы использовать один двигатель, который можно было бы переключать на работу соответствующего участка.
Структурное согласование системы должно проводиться по уровню и параметрам. Согласование элементов системы между собой обеспечивается внутренними связями, а системы с надсистемой и внешней средой - внешними связями.
Пример на этот вид согласования будет приведен при рассмотрении законов эволюции технических систем.
Функционально-структурное согласование определяет соответствие структуры с главной, основными и вспомогательными функциями. Тем самым обеспечивается выполнение каждой их необходимых функций.
Согласование необходимо начинать с функционального, затем проводится функционально-структурное, а затем структурное.
Функциональное согласование начинается с построения функционального дерева будущей системы. Иерархический набор функций должен обеспечить выполнения генеральной цели системы, а так же главной, основной и вспомогательных функций. На этом же этапе проверяется не противоречивость отдельных функций друг другу и максимальное свертывание функций.
На следующем этапе проводится функционально-структурное согласование. Его желательно начинать с построения структурно-элементного графа, соответствующего функциональному дереву системы.
В структурном согласовании определяются все взаимосвязи и взаимовлияния, которое проводится по уровню и параметрам между элементами и связями системы (внутреннее согласование) и системы с надсистемой и внешней средой (внешнее согласование).
Законы эволюции технических систем
[править]Структура законов эволюции технических систем
[править]Эти законы определяют общее направление развития технических систем. Структура этих законов изображена на рис. 64.

В своем развитии техника становится все более идеальной, т.е. ее развитие определяется законом увеличения степени ИДЕАЛЬНОСТИ.
Увеличение степени идеальности осуществляется выявлением и разрешением противоречий, которые возникают вследствие неравномерности развития систем.
Разрешение противоречий осуществляется использованием законов увеличения степени ДИНАМИЧНОСТИ системы, согласования и переходом системы в НАДСИСТЕМУ.
Увеличение степени динамичности проводится по функциям, структуре и управлению системой, которые осуществляются использованием закономерностей переходом системы на МИКРОУРОВЕНЬ, увеличением степени ВЕПОЛЬНОСТИ и ИНФОРМАЦИОННОЙ насыщенности систем.
Переход структуры системы с макро- на микроуровень осуществляется изменением масштабности и связанности элементов технической системы, а также использованием более сложных и энергетически насыщенных форм управления. Закон перехода с макро- на микроуровень, прежде всего, необходимо применять к рабочему органу.
На рис. 65 показана структура закона перехода системы на микроуровень. Механизмы каждой из закономерностей, например, дробления системы.

Согласование структуры системы может осуществляться согласованием элементов и связей системы. Согласование должно быть функциональное и параметрическое, согласование по уровням (системы с надсистемой – внешнее согласование, системы с подсистемами и подсистем между собой – внутреннее согласование). Приведем пример одного из видов параметрического согласования системы с надсистемой – согласования ритмики.
Пример 65. При добыче угля угольные пласты ослабляют, обрабатывая их мощными импульсами воды, подаваемые из гидромонитора. Повысить эффективность этого способа можно, если импульсы подавать с частотой, равной частоте собственных колебаний расшатываемого массива[35].
Переход системы в НАДСИСТЕМУ осуществляется двумя путями: выполнение системой функций надсистемы и объединением систем с другими системами.
Более подробно ознакомиться с законами развития технических систем можно в учебном пособии по законам развития систем[36][37][7].
В качестве примера кратко опишем закономерности увеличения степени дробления и перехода системы в надсистему. Закономерность увеличения степени дробления, представляет собой часть закона увеличения степени связанности.
Закон увеличения степени идеальности
[править]Увеличение степени дробления
[править]Увеличение степени дробления (дисперсности) вещества предусматривает и изменение твердости и эластичности. Прежде всего, это относится к рабочему органу.
Рабочий орган может быть монолитным и немонолитным (состоящим из отдельных частей). Вещество рабочего органа может быть твердым, нетвердым (мягким), жидким, газообразным и полем.
Рассмотрим более детально последовательность дробления, которая представлена на рис. 66.
Эта последовательность характеризуется переходом от твердой монолитной системы (1) к полностью гибкому (эластичному) объекту (2). Дальнейшее дробление приводит к разделению объекта на отдельные части, не связанные между собой или связанные с помощью какого-либо поля, например, магнитного.

Дробление идет в сторону измельчения каждой части вплоть до получения мелкодисперсного порошка или микросфер, т.е. объект становится порошкообразным (3).
Следующий переход приводит к гелю (4) - пастообразному веществу.
Затем изменяется степень вязкости вещества до получения жидкости (5).
Далее изменяется степень связанности жидкости. Происходит использование более легких и летучих жидкостей и использование аэрозолей (6).
Содержание газа в аэрозоле увеличивается, и таким образом происходит переход к газу (7).
Постепенно используется все более легкий газ. Затем газ становится более разряженным, следующий шаг приводит к крайнему состоянию - образованию вакуума. Последнее состояние в этой цепочке - использование поля (8).
На новом витке развития система вновь становится монолитной. На рисунке это показано в виде петли обратной связи.
Промежуточное состояние в каждом из указанных переходов может занимать "пена" в твердом, жидком, газообразном, прочих видах и их сочетаний. Кроме того, возможна комбинация (9) из указанных состояний, в любом сочетании. С целью повышения эффективности могут быть использованы технологические эффекты, характерные для данного состояния.
Примеры:
- Негибкое вещество, например, металл, дерево, пластмасса и т.п.;
- Гибкое (эластичное) вещество, например, резина, ткань, пленка, тонкие куски металла, фольга, проволка, трос и т.п.;
- Отдельные, несоединенные части, например, шарики, зерно, песок, микросферы, пыль и т.п.;
- Гель, например, желе, студень, паста, крем, масло, коллоидный раствор и т.п.;
- Жидкость: жидкости различной плотности, от жидких масел до спирта, эфира и жидких газов;
- Аэрозоль с различным процентным содержанием жидкости и газа;
- Газ различной плотности, от тяжелых до самых легких газов;
- Поле - виды полей и их сочетаний будут рассмотрены в главе "вепольный анализ";
- Комбинации: могут содержать от двух до восьми составляющих.
На этапе 1 широко применяются геометрические и некоторые физические эффекты. Сочетание этих эффектов часто встречается в строительстве при использовании предварительно напряженных конструкций.
Пример 66. Мост (рис. 67) выполнен в виде полусвернутого листа (рис. 67 а). Это пример использования монолита с геометрическим эффектом - скрученные или свернутые конструкции, которые значительно прочнее прямого листа.
-
 Рис. 67. Мост
Рис. 67. Мост -
 Рис. 67 а. Полусвернутый лист
Рис. 67 а. Полусвернутый лист -
 Рис. 68. Останкинская башня
Рис. 68. Останкинская башня



Пример 67. Останкинская башня, показанная на рис. 68. Это пример использования монолита с физическим эффектом - напряженные конструкции (растянутая арматура).
Полная схема дробления приведена на рис. 69. В нее дополнительно введены переходы от состояния (1) к состоянию (2), от (2) к (3) и переходы состояний (1) и (2) к капиллярно-пористым материалам (КПМ).

Переход от монолитной (твердой) системы (1) к гибкой (2) происходит по определенной закономерности, показанной на рис. 70.

Рассмотрим эту закономерность.
Первоначально объект разбивается на части, вплотную присоединенные друг к другу (1.1 а). Это соединение может быть разъемное (резьбовое, шпоночное и др., а также выполненное с помощью различных полей) и неразъемное (клеевое, сварное, и др.).
Дальнейшее разбиение приводит к увеличению количества частей в системе (1.1б, в). Для повышения эффективности конструкций используются геометрические и физические эффекты, например, различные формы частей и связей, предварительно напряженные конструкции.
На следующем этапе отдельные части соединяются жесткими связями (1.2 а). Количество частей и связей увеличивается.

Далее жесткость связей уменьшается, и постепенно связи делаются гибкими - шарнирными, пружинными и т.п. (1.2 б).
Примером этапа (1.2 а) могут служить фермы различных конструкций.
Пример 68. В 1889 году в Париже по проекту Эйфеля была сооружена ажурная трехсотметровая металлическая башня (рис. 71).
Пример 69. Другими примером могут служить оригинальные конструкции на основе гиперболоида Шухова. На ажурную башню (рис. 72 а), выполненную в форме гиперболоида, инженер В.Г.Шухов получил патент (Привилегию) России № 1896. На "сетчатые покрытия для зданий" (рис. 72 б) Шухов получил привилегию №1894 от 25 марта 1895 г. Основное достоинство этих сооружений, что их можно делать из прямолинейных деталей. Эти и многие другие конструкции описаны в книге: "В.Г.Шухов - выдающийся инженер и ученый" [38](рис. 72).
-
 Рис. 72 а. Башня Шухова
Рис. 72 а. Башня Шухова -
 Рис. 72 б. Сетчатое покрытие Шухова
Рис. 72 б. Сетчатое покрытие Шухова -
 Рис. 72 в. Овальный павильон Шухова с сетчатым стальным висячим покрытием. Всероссийская выставки 1896 года в Нижнем Новгороде
Рис. 72 в. Овальный павильон Шухова с сетчатым стальным висячим покрытием. Всероссийская выставки 1896 года в Нижнем Новгороде



Подобная же последовательность характерна и для перехода от эластичного вещества (2) к порошкообразному (3). Она изображена на рис. 73. Вантовые конструкции являются одним из примеров использования технологических эффектов на данном переходе.


В вантовых конструкциях основным несущим элементом сооружения служат натянутые стальные тросы или система тросов (тросовые фермы), по которым укладываются тонкие мембраны, из стали, алюминия и пр. Для покрытия зданий с большим пролетом вантовые конструкции представляются наиболее эффективным решением.
Пример 70. В Санкт-Петербурге построен спортивно-концертный комплекс с покрытием в виде мембраны диаметром 160 м, толщиной 6 мм и универсальными вантовыми конструкциями. За натяжением мембраны ведутся постоянные наблюдения. Крыша-мембрана спортивного зала Олимпийского стадиона в Москве толщиной 5 мм перекрывает без единой промежуточной опоры площадь свыше 30 тыс. кв. м. (рис. 74).

Пример 71. Отметим, что мембранные конструкции были известны и раньше, но в них использовались другие принципы, например, В.Г.Шухов использовал гиперболоид вращения.
На рис. 75 показана висячая мембрана Шухова в круглом павильоне Нижегородской выставки. В оригинальном павильоне круглого здания поверху наружных стен на высоте 6,4 м уложено металлическое кольцо диаметром 68 м. Внутри здания 16 металлических колон (высотой 15 м) держат второе кольцо диаметром 25 м.
Пространство между двумя кольцами перекрыто свободно висящей сеткой, состоящей из взаимно перекрещивающихся стальных полос, образующих ячейки в виде ромбов. По этому техническому проекту первое такое покрытие было построено Шуховым в 1894 г. над цехом котельного завода фирмы Бари в Москве[39].
Принцип вантовых конструкций использовался еще в сооружениях древности; и очень широко используется в наше время.
Пример 72. Принцип вантовых конструкций многократно использовал всемирно известный японский архитектор Кензо Танге. Среди его наиболее известных сооружений - два олимпийских спортивных зала в Токио - Ёёги, построенных для XVII летних Олимпийских игр 1964 г.[40](см. рис. 76).
-
 Рис. 76 а. Вид сверху на ансамбль стадионов
Рис. 76 а. Вид сверху на ансамбль стадионов -
 Рис. 76 б. Вид сверху на ансамбль стадионов
Рис. 76 б. Вид сверху на ансамбль стадионов -
 Рис. 76 в. Конструкция крыш Большого и Малого стадионов
Рис. 76 в. Конструкция крыш Большого и Малого стадионов -
 Рис. 76 г. Вид входа Сибуйя
Рис. 76 г. Вид входа Сибуйя -
 Рис. 76 д. Соединение главного троса с опорным пилоном
Рис. 76 д. Соединение главного троса с опорным пилоном -
 Рис. 76 е. Поперечный и продольный разрезы Большого стадиона
Рис. 76 е. Поперечный и продольный разрезы Большого стадиона






Приведем еще примеры веществ с различной связанностью.
Пример 73. При добыче полезных ископаемых роторные экскаваторы разрушают породу нерационально - резанием вместо наиболее экономичного ударного способа. Поэтому не обойтись без буровзрывных работ. В некоторых горных машинах используют принцип отбойного молотка[41].

При этом разрушение точечное, а площадь забоя большая, значит производительность маленькая. А если применить цилиндр, именно он при вращении разворачивается в плоскость. Надо взять трубу большого диаметра, насадить на ее поверхность зубья и катить по забою, который может стать наиболее технологическим - горизонтальным. Правда, катить необходимо под напором. Одновременно производя по трубе частые удары. Тогда трехметровая труба начинает разрушать породу во всей площади забоя[42](рис. 77).
В рассмотренном примере подсистема (рабочий орган) выполнен в виде монолитной трубы с зубьями, воздействующее на горную породу. Здесь рабочий орган соответствует состоянию вещества (1), изображенному на рис. 73.
Следующий переход (1.1) - псевдомонолит - отдельные части жестко соединены между собой (рис. 73). Причем соединения могут быть неразъемные (сварные, паянные, клеевые и т.п.) и разъемные (резьбовые, пазовые, шиповые и т.п.).
Пример 74. Для подъема кранов разработаны ходовые колеса со съемными ребордами - выступами, предупреждающими сход колеса с рельсовой колеи. Достаточно отвинтить быстро изнашиваемые боковины и поставить на их место новые. Появилась возможность делать эту деталь из более прочного металла, чем обод[43].
Дальнейшее развитие техники осуществляется заменой жесткой связи на гибкую (1.2 в). Необходимо учесть, что постепенно число частей увеличивается, а связи между ними становятся все более гибкими.
Пример 75. Чтобы цанга надежно зажимала деталь, кольцевые прорези губок цанги заполняют эластичным материалом. Для усиления упругости цангового патрона в месте перехода лепестков в корпус делают кольцевые пазы[44].
В дальнейшем рабочий орган выполняют полностью гибким (2).
Пример 76. Разъем для печатных плат, содержащий корпус из диэлектрика и упругие контактные элементы, выполненные в виде изогнутых S-образных пружин, будет более надежным при контактировании, если изогнутые пружины изготовить в виде ряда последовательно расположенных проволочек[45].
Следующий этап в развитие технических систем приводит к практическому исчезновению связей между отдельными частями и количество частей еще больше увеличивается, а их размеры уменьшаются (3).
Пример 77. Предлагается повысить надежность электрического соединения в контактном гнезде, содержащим диэлектрический корпус из упругого эластичного материала с размещенным внутри токопроводящим элементом, отверстием для контактирующего штыря и контактом для подключения. Цель достигается за счет выполнения токопроводящего элемента в виде металлических шариков, диаметр которых больше диаметра отверстия для контактирующего штыря[46].
Пример 78. Подшипник скольжения - это вал во втулке. В небольшой зазор, исчисляемый микронами, подается смазка. Недостаток подшипника - большие значения пускового момента и необходимость в антифрикционных сплавах. Значительное улучшение параметров подшипника скольжения может быть достигнуто, если в смазку добавить стеклянные шарики. На первый взгляд - абсурдная идея. Какие шарики, если нагрузка тонны? Однако стекло слабо сопротивляется только ударным нагрузкам, а на сжатие оно работает не хуже металла. Стеклянные шарики получают из расплава в воздушном потоке с медленным охлаждением, чтобы не было микротрещин. Такие шарики имеют диаметр 2-20 мкм и выдерживают внушительную нагрузку сжатия - 800 мега паскалей (800 атм.).
После добавления шариков в смазку нет необходимости изготовлять втулку из сплавов цветных металлов - по причине схожести механизма трения пары с подшипником качения, а напротив, есть необходимость делать ее из стали. Диаметр стеклошариков выбирают из соображения соразмерности зазора и высоты гребешков - шероховатости, класса чистоты обработки втулки и вала. Шарики, попадая во впадины шероховатостей, не оседают в них, а все время выкатываются и движутся вместе со смазкой.
Тем самым происходит обкатка острых края шероховатостей, как бы упрочняют и полируют поверхность, уменьшая величину гребешков. По этой причине при использовании стеклошариков уменьшается коэффициент трения пары и возникает эффект почти троекратного снижения мощности холостого хода машины[47].
Пример 79. При изготовлении эффективных угольных адсорбентов уголь измельчают до размеров частиц менее 100 мкм, гранулируют, сушат, карбонизируют, в ходе чего уголь становится пластичным, и активизируют его паром и газом при температуре 800-900oС. Летучими продуктами гранулы вспучивают и образуют разветвленную систему пор. Такой адсорбент стопроцентно очищает газы от альдегидов, спиртов кетонов, органических оснований, жирных кислот и других углеродов[48].
В результате соединения твердого вещества с жидкостью в технической системе получается пульпа (обмазка) и гель (4), имеющий аморфную структуру (клей сначала в полужидком виде, а затем затвердевающий на воздухе). Такие вещества - обмазка и клей - являются основными компонентами технической системы, рассматриваемых в последующих двух примерах.
Пример 80. Стойкость крупных штампов (2х1)м повышается в 1,5-3 раза (даже при использовании низкоуглеродистой стали), если этот инструмент насытить бором и алюминием из дешевых обмазок, наносимых на поверхность слоем толщиной 6 мм. Обмазка легко удаляется после закалки и отпуска. Защищают они инструмент и от окалины[49].
Пример 81. Треснувший корпус цилиндра или разбитый картер двигателя, обычно долго ремонтируют, можно быстро склеить полимерным клеем К-153. Даже глубокие трещины в металле клей заваривает намертво. Состоит он из эпоксидной смолы, отвердителя, металлических наполнителей[50].
Использование вещества в жидком состоянии (5) в технических системах описано в следующем примере.
Пример 82. Скользящая обойная опалубка повышает качество бетонирования монолитной бетонной крепи вертикальных шахтных стволов. Прессующая секция опалубки сделана из двухслойных резиновых листов, которые раздвигались под давлением жидкости, герметизируют стык между опалубкой и верхней части крепи. И пока подается бетон, резиновая рубашка разравнивает и уплотняет бетонную смесь. После набора опалубкой прочности давление жидкости снимается, резиновые листы отжимаются, и опалубку можно переместить на следующую позицию[51].
Аэрозоли (6) используются достаточно широко в технике и быту.
Газообразное состояние вещества (7) достаточно распространено в технике.
Пример 83. Ученые СССР предложили проект прокладки транспортных магистралей по болотам, основным элементом которых являются эластичные надувные камеры. Дорога по болоту выполняется из сборных щитов. На нижней части каждого щита размещается эластичная надувная камера из резинотканного материала. Щиты выполнены металлическими и соединяются замками так, чтобы получилось сплошное покрытие, давление воздуха в надувных камерах не велико и поэтому для их наполнения используются выхлопные газы автотранспорта. В нерабочем виде из камер выпускается воздух, и дорога складывается в гармошку[52].
Применение поля (8), например, ионизированного газа - плазмы - представлено в следующем примере.
Пример 84. Специалисты фирмы "Вестингауз" (США) решили крупнейшую проблему переработки токсичных отходов, в частности так называемых многохлористых дифенилов. Они использовали высокотемпературную плазму, образующуюся при пропускании воздуха через электрическую дугу (5000oС). Сжигание этих веществ в низкотемпературных печах затруднено, так как при этом образуются сложные вторичные токсичные вещества. При использовании же плазмы образуются более простые соединения - в основном хлористый водород и окись углерода. Хлористый водород нейтрализуется, а окись углерода сжигается; ее можно использовать как топливо. Способ обеспечивает уничтожение свыше 99,99% опасных веществ и дешевле других способов[53].
Применение жидкой и твердой пены - промежуточного состояния вещества между твердым (жидким) и газообразным описано в следующих двух примерах.
Пример 85. Для защиты наплавляемого в процессе сварке металла используют легкоплавкий флюс или инертный газ. И все-таки металл выгорает, его расход большой. Предлагается производить сварку под слоем пены. Пену получают путем вспенивания газом (аргон, азот) водного раствора мыла и глицерина. Для легированных сталей лучше применять аргон. Пенная защита сократила расход дорогостоящего аргона в 6-8 раз. При пенной защите места сварки электрическая дуга становится более устойчивой, уменьшается пористость наплавленного металла[54].
Пример 86. В ФРГ разработано кресло-коляска из пенополиуретана. В этом кресле решена совокупно проблема надежности, смены сидений, размерности. Воздушные емкости в подушках на сидении позволяют человеку "отформировать" кресло по своему удобству. Материал отлично стерилизуется, выдерживает большой груз и прекрасно поглощает удар. Такое кресло весит около 10 кг[55].
Приведем сквозные примеры реализации этой последовательности.
Рассмотрим тенденции развития уплотнителей.
Пример 87. Первое уплотнители представляли собой монолитную конструкцию (1). Примером может служить притертая пробка или кран. Далее стали появляться первые гибкие элементы, например, кольца поршней. Количество гибких частей стало увеличиваться. В конце концов, уплотнитель стал полностью гибким (2), например, резиновые уплотнители - сальники. Используются уплотнитель в виде намотанных нитей, например, пакли. Известны уплотнители в виде отдельных шариков или порошка (3). Широко используются для уплотнения различные гели (4) - пушечное сало, тавот, солидол и т.п. Жидкости (5) также используются в качестве уплотнителей, например, газовый сифон. Еще более идеальны уплотнители, использующие магнитные и реологические жидкости. Они удерживают большие давления и не истираются.
Известны использования газовых уплотнителей (6). Обычно такое уплотнение используется в сочетании с каким-либо полем, например, полем давления, т.е. осуществляется подпор противодавлением.
Пример 88. Оригинальное использование газовых уплотнителей предложил академик П.Л.Капица. Для сжижения гелия используются расширительные машины (при расширении газ охлаждается). В расширительной машине поршень должен двигаться в цилиндре быстро, т.е. без трения для быстрого расширения объема камеры. Это приводит к необходимости делать между поршнем и цилиндром зазор, но тогда зазор будет пускать газ.
Таким образом, возникает противоречие: поршень не должен соприкасаться с цилиндром (должен быть зазор), чтобы поршень свободно и быстро двигался, и поршень должен соприкасаться с цилиндром (зазора быть не должно), чтобы в зазор не уходил газ, т.е. для герметизации зазора.
Естественно, что пытались, как можно точнее притирать поршень к цилиндру. Но, несмотря на это, поршень заклинивало из-за резкого изменения температур. Не спасли и уплотнительные кольца. Наконец предложили заполнить зазор между цилиндром и поршнем смазкой.
Смазка прекрасно справлялась со своими обязанностями, но при температуре жидкого гелия смазка замерзала и становилась хрупкой, как стекло. Петр Леонидович в разработанной им установке отказался от смазки. Он предложил сделать зазор между цилиндром и поршнем такой, чтобы поршень двигался свободно, а сжатый газ утекал через зазор. При утечке газ быстро расширяется и создает противодавление, мешающее вытеканию новой порции газа. Протекающий газ является как бы газовой смазкой.
Кроме того, в предложенной установке время расширения газа очень мало (сотые доли секунды). Общая утечка газа составляет 2-3%[56] .
Но даже эти "потери" газа можно вернуть обратно, если замкнуть выход цилиндра с камерой. Много примеров уплотнителей представляющих собой комбинации описанных переходов.
Пример 89. Уплотнение в скафандрах в местах одевания перчаток и носков. Первоначально такое уплотнение представляло собой эластичный пустотелый тор, в который подавался воздух под давлением. В дальнейшем в это кольцо поместили губку (латексную) с открытыми порами, в которых содержится определенное количество воздуха. При понижении давления с наружи скафандра из губки выделяется воздух и в кольце создается повышенное давление, раздувающее тор, герметизируя запястье . Здесь использованы гибкая оболочка, пористое вещество - губка и давление воздуха[57]. Для герметизации могут использоваться и гибкая оболочка, заполненная сыпучими телами (шарики, песок, микрокапсулы и т.п.). Ее прикладывают к месту, которое необходимо загерметизировать, а затем откачивают воздух из оболочки. Тогда, под действием образовавшейся разности давлений, частицы сыпучих тел теряют возможность смещаться одна относительно другой.
Эта конструкция как бы "твердеет", практически без изменения формы.
Полученную таким образом плотную структуру возможно использовать.
Пример 90. Для заделки пробоины и подводной части корпуса корабля: к борту крепко прижимается сеть, которую заполняют под давлением эластичными гранулами[58].
Пример 91. Схожее решение, только на микроуровне. Для защиты скафандра космонавта от метеоритных пробоин. Роль сетки здесь выполняет жидкое резиновое связующее, роль гранул - порошок наполнителя[59].
-
 Рис. 78 а. Патент США № 3 536 576 (фиг.1).
Рис. 78 а. Патент США № 3 536 576 (фиг.1). -
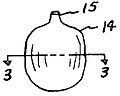 Рис. 78 б. Патент США № 3 536 576 (фиг.2).
Рис. 78 б. Патент США № 3 536 576 (фиг.2). -
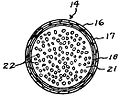 Рис. 78 в. Патент США № 3 536 576 (фиг.3).
Рис. 78 в. Патент США № 3 536 576 (фиг.3). -
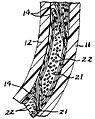 Рис. 78 г. Патент США № 3 536 576 (фиг.4).
Рис. 78 г. Патент США № 3 536 576 (фиг.4). -
 Рис. 78 д. Патент США № 3 536 576 (фиг.5).
Рис. 78 д. Патент США № 3 536 576 (фиг.5).





Пример 92. Аналогичным образом работают вакуумная формовка для литья, захват и фиксация деталей[60].
В качестве еще одного примера рассмотрим тенденцию развития щеток электродвигателей и электрогенераторов.
Пример 93. Первоначально щетки представляли собой монолитный (1) электрод, медный или угольный. Затем появились подпружиненные контакты (2), выполненные из угля или меди. На следующем этапе развития появились щетки в виде отдельных металлический упругих волосков (2). Известны щетки в виде графитового порошка (3).
Американская фирма "Вестингауз" в электрогенераторах большой мощности применяет вместо традиционных графитовых щеток для съема электроэнергии циркулирующий поток жидких (5) металлов натрия и калия. Такой метод позволяет снимать с единицы площади большей, чем в традиционных условиях, ток. А это в свою очередь ведет к существенному уменьшению габаритов электрогенераторов[61].
Наконец, идеальные щетки, которых нет, а их функции выполняются. В качестве таких щеток может служить ионизированный газ (8), который является прекрасным проводником.
Закон перехода в надсистему
[править]В общем случае закон перехода в надсистему имеет два направления: выполнение системой функций надсистемы (или придание системе дополнительных функций) и объединение системы с другой (другими) системой (системами). Структурная схема закона перехода в надсистему показана на рис. 79.

В свою очередь первое направление выполняется выявлением альтернативных способов осуществления функции надсистемы без использования существующей системы, и придать системе дополнительные функции.
Пример 94. Существует система доска, на которой пишут мелом. Функция писать на доске. Эту же функцию можно выполнить, если писать. Более общая функция оставлять изображение. Ее можно выполнить, если писать на больших листах бумаги, например, фломастером. Можно проектировать изображение на экран с помощью проектора, соединенного с компьютером.
При придании системе дополнительных функций систему объединяют с другой функцией. В общем случае это может происходить по технологии описанной ниже. В качестве примера можно привести радио с часами.
Г.Альтшуллер сформулировал закон перехода в надсистему формулируется следующим образом: исчерпав ресурсы развития, система объединяется с другой системой, образуя новую, более сложную систему. Кроме того, Альтшуллер предложил механизм такого перехода. Он состоит в объединении двух исходных систем, при этом получают бисистему, или нескольких систем с получением полисистемы. Переход "моно-би-поли" - неизбежный этап в развитии всех технических систем. Механизм перехода "моно-би-поли" показан на рис. 80. После объединения систем в би- или полисистему происходит некоторое изменение новой системы. При этом сокращаются вспомогательные элементы, и устанавливается более тесная связь между отдельными системами. Такие системы называются частично свернутыми.

Дальнейшее развитие приводит к полностью свернутым системам, в которых один объект выполняет несколько функций. Полностью (а иногда и частично) свернутая би- или полисистема становится новой моносистемой и может совершить новый виток спирали (рис. 81). Объединение в би- и полисистему может происходить нескольким путями:
- Создание системы из однородных (одинаковых) элементов. Объединение производится таким образом, что полезное (необходимое) качество отдельных элементов складывается, усиливается, а вредные взаимно компенсируются или остаются не прежнем уровне. Объединение такого типа возможно как для достаточно высокоразвитых систем, как и для простых элементов.Объединяются электростанции в единую энергетическую систему, вагоны - в железнодорожный состав, детали - для совместной обработки торцевых поверхностей.
- Соединение би- или полисистемы из однородных элементов со сдвинутыми характеристиками. Элементами со сдвинутыми характеристиками называются однородные элементы с неодинаковыми параметрами, свойствами, характеристиками. Объединение элементов в систему происходит аналогично объединению однородных элементов. Примерами объединения однородных элементов со сдвинутыми характеристиками являются объединение стержней разного цвета в шариковой авторучке, объединение металлов с различными коэффициентами температурного расширения в биметаллической пластине, объединение корпусов разных размеров и форм в катамаране и полимаране и т.д.
- Создание би- или полисистемы из конкурирующих (альтернативных) систем. Такое объединение систем применяется в тех случаях, когда для выполнения той или иной функции имеется несколько разных путей, а, следственно, и систем. Объединение, также и в предыдущих случаях, производится таким образом, что недостатки каждого из элементов компенсируется, а преимущества складываются. Примерами объединения такого типа может служить Максутовский телескоп, объединяющий линзовые и зеркальные телескопические системы; турбовинтовой двигатель, объединяющий преимущества реактивного и винтового двигателя и т.д. Этот вид объединения систем часто применяется в тех случаях, когда одна система достигла своего потолка развития, а другая, более совершенная, еще не может заменить ее полностью. Например, паровая машина на парусных кораблях использовалась при штиле, но из-за низкой экономичности не могла обеспечить весь трансатлантический рейс. Поэтому на промежуточных этапах появились парусно-паровые корабли. Аналогично в настоящее время создаются автомобили, имеющие не только двигатель внутреннего сгорания, но и электродвигатель.
- Объединение в би- или полисистему разнородных элементов. Примером такого объединения являются полисистема "мотоцикл", объединившая велосипед, двигатель, баки и т.д.; различного рода предметы, объединенные в мебельном гарнитуре; вообще любая система, объединяющая элементы, выполняющие разные функции.
- Соединение би- или полисистем из антагонистических элементов (элементов с противоположными свойствами). Объединение систем с противоположными функциями позволяет повысить управляемость надсистемы, произвольно менять ее параметры в широком диапазоне и наделить систему новыми функциями. Примерами может служить карандаш с резинкой, позволяющий не только писать, но и стирать; кондиционер, объединивший нагреватель и холодильник.

Дальнейшее развитие би- и полисистем происходит в двух направлениях:
- Эффективность новых систем может быть повышена увеличением различия между элементами системы. Движение идет от однородных элементов (пачка одинаковых карандашей) к элементам со сдвинутыми характеристиками (набор цветных карандашей), к альтернативным элементам (карандаш и авторучка); к разнородным элементам (карандаш с циркулем), а затем - к инверсным (карандаш с резинкой).
- Эффективность новых систем повышается развитием связей между элементами. Связь элементов изменяется от "нулевой", т.е. без вещественных связей между элементами, до усиленных межэлементарных (жестких) связей. Дальнейшее развитие связей во многих системах происходит в соответствии с цепочкой связанности (см. рис. 66, 69, 70, 73).
Кроме того, при объединении систем может происходить дальнейшее их развитие по линии упрощения. В результате возможны следующие варианты:
- Система из практически самостоятельных, несвязанных элементов, не изменяющихся при объединении.
- Система частично изменяемых, согласованных между собой элементов, которые функционируют только вместе и только в данной системе. Например, отдельные радиоэлементы в микросхеме. Такая система получила название полностью свернутой системы.
- Полностью свернутую систему можно представить как новую моносистему. Ее дальнейшее развитие связано с движение по новому витку спирали. Иногда в качестве новой моноститемы может выступать частично свернутая система.

Пример 95. Холодильный костюм для горноспасателей должен мало весить (не более 28 кг), чтобы он смог работать. Кислородный аппарат весит более 12 кг, инструменты - 7 кг и остается 9 кг на сам костюм и холодильный агрегат (хладовещество и оборудование).
В качестве хладовещества применяют: сухой лед, фреон, сжиженные газы. Этого веса не достаточно, чтобы обеспечить холодильную мощность для работы не менее двух часов (это условие, поставленное заказчиком). Необходим запас не менее 15-20 кг.
Предложено объединить холодильную и дыхательную системы в единый скафандр, в котором одно холодильное вещество (жидкий кислород) выполняет две функции: сначала испаряется, а потом идет на дыхание.
Отпадает необходимость в тяжелом дыхательном аппарате, что позволяет во много раз увеличить запас холодильного вещества[62].
На рис. 82 показано устройство газотеплозащитного костюма. Жидкий кислород размещен в ранцевом резервуаре 1. Испаряясь, кислород поступает в инжектор 2, расположенный по оси сквозного канала 3. Вытекая из инжектора, кислород смешивается с теплым воздухом подкостюмного пространства и охлаждает его.
Обзор систем законов других авторов
[править]В этом разделе будет дан краткий обзор других существующих систем законов. Наиболее полный обзор дан в работе Петров В. История разработки законов развития технических систем[63][8].
Ссылки
[править]- ↑ Альтшуллер Г.С. «Линии жизни» технических систем. - Альтшуллер Г.С. Творчество как точная наука. Теория решения изобретательских задач. – М.: Сов. Радио, 1979, 184 с. – Кибернетика, с. 113-119. http://www.altshuller.ru/triz/zrts4.asp. Альтшуллер Г. О прогнозировании развития технических систем. – Баку, 1975. – 13 с. (рукопись) http://www.altshuller.ru/triz/zrts3.asp. Альтшуллер Г.С. Основные этапы развития технических систем. – Альтшуллер Г.С. Дерзкие формулы творчества. - Дерзкие формулы творчества/ (Сост. А.Б. Селюцкий). – Петрозаводск: Карелия, 1987. – 269 с. – (Техника-молодежь-творчество), с. 25-29.
- ↑ Альтшуллер Г.С. О законах развития технических систем. – Баку, 20.01.1977. http://www.altshuller.ru/triz/zrts1.asp
- ↑ Альтшуллер Г.С. Законы развития систем. - Альтшуллер Г.С. Творчество как точная наука. Теория решения изобретательских задач. - М.: Сов. радио, 1979.-184 с. - Кибернетика. (с. 113-127)
- ↑ Альтшуллер Г.С. Законы развития технических систем. - Альтшуллер Г.С. Дерзкие формулы творчества.- Дерзкие формулы творчества/ (Сост. А.Б. Селюцкий). – Петрозаводск: Карелия, 1987. – 269 с. – (Техника-молодежь-творчество), с. 61-65.
- ↑ Альтшуллер Г.С. Найти идею. Введение в теорию решения изобретательских задач. - Новосибирск.: Наука, 1986, 209 с. (с. 90-106)
- ↑ Альтшуллер Г.С., Верткин И. Линии увеличения пустотности. Баку, 1987 (рукопись). http://www.altshuller.ru/triz/zrts5.asp.
- ↑ Альтшуллер Г.С. Найти идею. Введение в теорию решения изобретательских задач. - Новосибирск.: Наука, 1986, 209 с. (с. 90-100).
- ↑ Альтшуллер Г.С. Маленькие необъятные миры. Стандарты на решения изобретательских задач. - Нить в лабиринте/Сост. А.Б.Селюцкий. - Петрозаводск: Карелия, 1988. с. 165-230.
- ↑ Эта система законов разрабатывалась В.Петровым в период 1976-82 годы и впервые была доложена на традиционном Ленинградском семинаре в 1980, более детальная система была доложена на семинаре преподавателей и разработчиков ТРИЗ (Петрозаводск-82), а опубликована в 1984 г. Петров В.М. Закономерности развития технических систем. - Методология и методы технического творчества. - Тезисы докладов и сообщений к научно-практической конференции 30 июня - 2 июля 1984 г. - Новосибирск, 1984, с. 52-54.
- ↑ Петров В.М. Принципы и методика выбора перспективного направления НИОКР в судостроении. Автореферат диссертации на соискание ученой степени кандидата экономических наук. - Л.: ЛКИ, 1985.-20 с. Петров В.М., Злотина Э.С. Теория решения изобретательских задач - основа прогнозирования развития технических систем. - Л.: Квант, - Братислава: ДТ ЧСНТО, 1989, 92 с.
- ↑ Эйрес Р. Научно-техническое прогнозирование и долгосрочное планирование, - М.: Мир, I971. Янч Э. Прогнозирование научно-технического прогресса. Пер. с англ. (Общ. ред. и предисл. Д.М.Гвилиани), Изд.2-е, доп. - М.: Прогресс, 1974, 586 с.
- ↑ Шерохов А.П. К истории военного кораблестроения. - М.: Воениздат, 1952, с 25, 55.
- ↑ Шапиро Л.С. Самые быстрые корабли. - Л.: Судостроение, 1981, с. 9.
- ↑ Каноэ - лодка у индейских племен Северной Америки. Каноэ изготовлялось либо из целого ствола дерева (путем выжигания и выдалбливания), либо сначала строится каркас, который затем обтягивали корой. Современное каноэ - безуключное гребное судно, для которого характерны челночнообразная форма корпуса и способ гребли одним однолопастным веслом.
- ↑ Гондола (итал. gondola), одновесельная плоскодонная лодка с поднятыми фигурными оконечностями, распространенная главным образом в Венеции (упоминается в источниках с конца XI в.)
- ↑ Павел Фирст , инж. Вацлав Паточка. Паруса над океанами. (Модели старинных парусников). Пер. С чешского Е.С. Тетельбаума. Л., Судостроение, 1977. с. 20.
- ↑ Болдырев А.В., Боровский Л.М. Эллинистическая техника, Изд. АН СССР, М.-Л.. 1948, с 328.
- ↑ Павел Фирст, инж. Вацлав Паточка. Паруса над океанами. (Модели старинных парусников). Пер. С чешского Е.С. Тетельбаума. Л., Судостроение, 1977. 176 с.
- ↑ Суда с надувными валиками. - Морской флот, № 12, 1974, с 53.
- ↑ Лучанский И.А. Яновский А.А. От весла до водомета. - Л.: Судостроение, 1964, с. 84.
- ↑ Маслов В.В. Современная энергетика морского флота. - М.: Знание, 1979, с. 63-64.
- ↑ Прекрасная новость: парусники лучше винтовых судов! Патенты всего мира. - Изобретатель и рационализатор, 1978, № 9, с 25. На всех парусах. - Социалистическая индустрия, 27.03.75, с.4.
- ↑ Крючков Ю.С., Перестюк И.Е. Крылья океана. - Л.; Судостроение, 1983. с. 38.
- ↑ Суда и судоходство будущего: Пер. С нем./Шенкнехт Р., Люш Ю., Шельцель М. И др. - Л.: - Судостроение, 1981. - 208 с. (c. 69).
- ↑ Крючков Ю.С., Перестюк И.Е. Крылья океана. - Л.; Судостроение, 1983. с. 47.
- ↑ Крючков Ю.С., Перестюк И.Е. Крылья океана. - Л.; Судостроение, 1983. с. 47.
- ↑ Крючков Ю.С., Перестюк И.Е. 1983. с. 48.
- ↑ Патент Франции № 2 607 557. Юный техник, № 6, 1989, с. 72.
- ↑ Крючков Ю.С., Перестюк И.Е. 1983. с. 63.
- ↑ Техника молодежи, № 12, 1981, с.45.
- ↑ Социалистическая индустрия, №36 (4127) 13.02.83.
- ↑ Крючков Ю.С., Перестюк И.Е. Крылья океана. - Л.; Судостроение, 1983. с. 216.
- ↑ Суда и судоходство будущего: Пер. С нем./Шенкнехт Р., Люш Ю., Шельцель М. И др. - Л.: - Судостроение, 1981. - 208 с. (c. 69).
- ↑ Крючков Ю.С., Перестюк И.Е. Крылья океана. - Л.; Судостроение, 1983. с. 228.
- ↑ А.с. № 317 797
- ↑ Петров В., Злотин Э. Законы развития технических систем. Учебное пособие. - Тель-Авив, 1992.
- ↑ Петров В. Серия статей «Законы развития систем» http://www.trizland.ru/trizba.php?id=108
- ↑ В.Г.Шухов - выдающийся инженер и ученый: Труды Объединенной научной сессии Академии наук СССР, посвященной научному и инженерному творчеству почетного академика В.Г.Шухова. М.: Наука, 1984, 96 с.
- ↑ В.Г.Шухов - выдающийся инженер и ученый: Труды Объединенной научной сессии Академии наук СССР, посвященной научному и инженерному творчеству почетного академика В.Г.Шухова. М.: Наука, 1984, 96 с. (с. 44-45).
- ↑ Кензо Танге. 1949-1969.Архитекрура и градостроительство. Пер. c нем. М., Стойиздат, 1978. 252 с. Составитель Удо Культерман.
- ↑ А.с. 1 002 470, 1 051 185, 1 082 911.
- ↑ Изобретатель и Рационализатор, № 9, 1988, с.33.
- ↑ А.с. 633 789. Изобретатель и Рационализатор, № 7, 1988, МИ 0705, с.2
- ↑ А.с. 1 266 672. Изобретатель и Рационализатор, №, 6, 1988, МИ 0607, с.2
- ↑ А.с. 411 673.
- ↑ А.с. 813 838. Бюллетень Изобретений , № 10,1979.
- ↑ Изобретатель и Рационализатор, № 11, 1988, с. 12.
- ↑ Изобретатель и Рационализатор, № 11, 1988, МИ 1106, с.2.
- ↑ Изобретатель и Рационализатор, № 11, 1988, МИ 1002, с 2
- ↑ Изобретатель и Рационализатор, № 7, 1988, МИ 0726, с.1
- ↑ А.с. 1 285 154. Изобретатель и Рационализатор, № 6, 1988, МИ 0620, с.1
- ↑ Богданов В.В. Удивительный мир резины. - М.: Знание, 1989, с. 24.
- ↑ Изобретатель и Рационализатор, №11,1988, МИ 1102, с. 2
- ↑ Меркин А.П., Таубе П.Р. Непрочное чудо. - М.: Химия, 1983, с.173.
- ↑ Изобретатель и Рационализатор, №7, 1989, с.42
- ↑ Капица П.Л. Эксперимент, теория, практика. - М.: Наука, 1977, с 16-18.
- ↑ А.с. № 435 829.
- ↑ А.с. № 703 418.
- ↑ Патент США № 3 536 576.
- ↑ А.с. № 1 165 553
- ↑ Социалистическая индустрия, 06.02.75
- ↑ Это изобретение Г.Альтшуллера. Оно описано в книге: Альтшуллер Г.С. Алгоритм изобретения. 2-е изд. – М.: Московский рабочий, 1973.-296 с. (с. 110-111).
- ↑ Петров В. История разработки законов развития технических систем. – Тель-Авив, 2002. http://www.trizland.ru/trizba/pdf-books/zrts-01-history.pdf